






产品分类 更多>>



1、澳标H型钢150UC30.0然而,纳米材料与装备制造的结合并非易事。铁岭阀门吴宏年副总经理向我们透露,纳米阀门为铸铁锻造,表面采用激光熔覆技术,全现代化设备制造。阀门表面硬度为HRC35~4,但很耐磨,预计寿命比以前提高3~4倍。阀门要在宁夏引黄工程中校核一年,如果没有出现问题才算试制成功。现阶段,整体铸铁的熔覆为技术攻关难点。科学家守口如瓶科学院金属研究所创建于1953年,是材料科学与工程,腐蚀科学与防护领域国内一流的研究所。3阀门无裂纹,开关灵活严密,铸造规矩,手轮无损坏,并有出厂合格证。4地下消火栓,地下闸阀、水表品种、规格应符合设计要求,并有出厂合格证。5捻口水泥一般采用不小于425#的硅酸盐水泥和膨胀水泥(采用石膏矾土膨胀水泥或硅酸盐膨胀水泥)。水泥必须有出厂合格证。6其它材料:石棉绒、油麻绳、青铅、铅油、麻线、机油、螺栓、螺母、防锈漆等。2主要机具:2.2.1机具:套丝机、砂轮机、砂轮锯、试压泵等。2工具:手锤、捻凿、钢锯、套丝扳、剁斧、大锤、电气焊工具、倒链、压力案、管钳、大绳、铁锹、铁镐等。3其它:水平尺、钢卷尺等。业条件:2.3.1管沟平直,管沟深度、宽度符合要求,阀门井、表井垫层,消火栓底座施工完毕。2管沟沟底夯实,沟内无障碍物。且应有防塌方措施。3管沟两侧不得堆放施工材料和其它物品。作工艺3.1工艺流程:安装准备→清扫管膛→管材、管件、阀门、消火栓等就位→管道连接→灰口养护→水压试验→管道冲洗镀锌碳素钢管的安装工艺流程参见1-2。2根据施工图检查管沟坐标、深度、平直程度、沟底管基密实度是否符合要求。3管道承口内部及插口外部飞刺、铸砂等应预先铲掉,沥青漆用喷灯或气焊烤掉,再用钢丝刷除去污物。阀门、管件稳放在规置,作为基准点。把铸铁管运到管沟沿线沟边,承口朝向来水方向。据铸铁管长度,确定管段工作坑位置,铺管前把工作坑挖好。大绳把清扫后的铸铁管顺到沟底,清理承插口,然后对插安装管路,将承插接口顺直。

2、150UC30.0澳标H型钢的执行标准:AS/NZS 3679.1,材质有:G250、G300、G350等
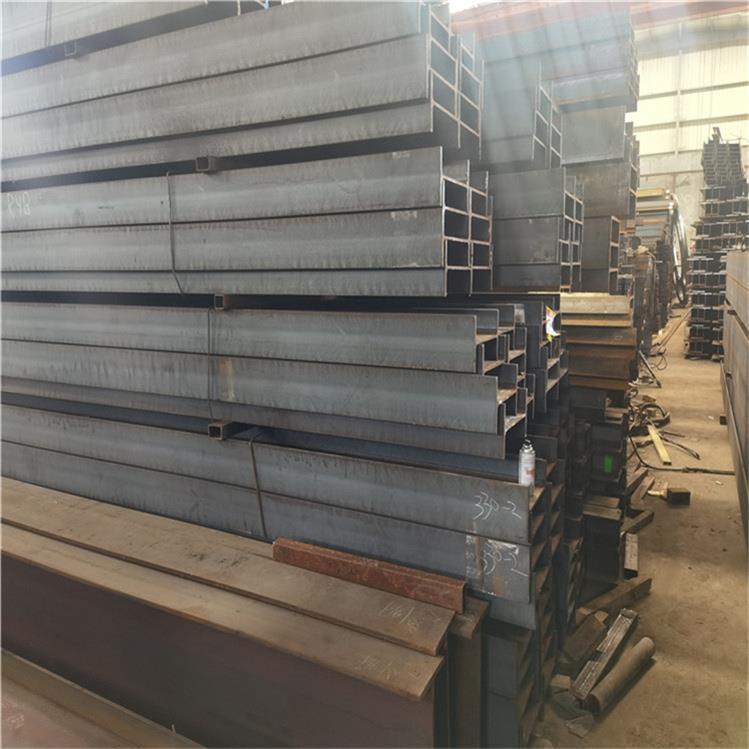
4、澳标H型钢规格型号表:
冶金矿产:
据此确定了如下GPCM编码规则:确定量,阀的前几位节流单元流量按照二进制比例排列,可以得到较高的分辨率,达到要求的控制性能。2控制策略GPCM阀控位置伺服系统除了液压伺服系统所固有的非线性特性外,还由于采用了脉冲调制控制,具有流量变化不连续的特点,系统高精度控制困难,系统建模不易且相关参数难以确定,使得基于被控对象数学模型的各类控制方法不能有效解决此控制问题。本文提出了一种新的控制方法应用于GPCM液压伺服控制系统。
2、150UC30.0澳标H型钢的执行标准:AS/NZS 3679.1,材质有:G250、G300、G350等
4、澳标H型钢规格型号表:
| 澳标H型钢现货库存表 | |||
| 型号 | 米重 | 型号 | 米重 |
| 150UB 14.0 | 14 | 310UB 46.2 | 46.2 |
| 150UB 18.0 | 18 | 310UC 96.8 | 96.8 |
| 150UC 23.4 | 23.4 | 310UC 118 | 118 |
| 150UC 30.0 | 30 | 310UC 137 | 137 |
| 150UC 37.2 | 37.2 | 310UC 158 | 158 |
| 200UB 18.2 | 18.2 | 360UB 44.7 | 44.7 |
| 200UB 22.3 | 22.3 | 360UB 50.7 | 50.7 |
| 200UB 25.4 | 25.4 | 360UB 56.7 | 56.7 |
| 200UB 29.8 | 29.8 | 410UB 53.7 | 53.7 |
| 200UC 46.2 | 46.2 | 410UB 59.7 | 59.7 |
| 200UC 52.2 | 52.2 | 460UB 67.1 | 67.1 |
| 200UC 59.5 | 59.5 | 460UB 74.6 | 74.6 |
| 250UB 25.7 | 25.7 | 460UB 82.1 | 82.1 |
| 250UB 31.4 | 31.4 | 530UB 82 | 82 |
| 250UB 37.3 | 37.3 | 530UB 92.4 | 92.4 |
| 250UC 72.9 | 72.9 | 610UB 101 | 101 |
| 250UC 89.5 | 89.5 | 610UB 113 | 113 |
| 310UB 32.0 | 32 | 610UB 125 | 125 |
冶金矿产:
据此确定了如下GPCM编码规则:确定量,阀的前几位节流单元流量按照二进制比例排列,可以得到较高的分辨率,达到要求的控制性能。2控制策略GPCM阀控位置伺服系统除了液压伺服系统所固有的非线性特性外,还由于采用了脉冲调制控制,具有流量变化不连续的特点,系统高精度控制困难,系统建模不易且相关参数难以确定,使得基于被控对象数学模型的各类控制方法不能有效解决此控制问题。本文提出了一种新的控制方法应用于GPCM液压伺服控制系统。




















